- Mars Reconnaissance Orbiter
-
Mars Reconnaissance Orbiter MRO 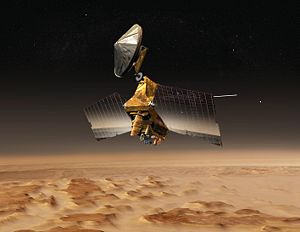
Заказчик Производитель  Lockheed Martin Space Systems
Lockheed Martin Space Systems
Университет Аризоны
Applied Physics Laboratory
 Итальянское космическое агентство
Итальянское космическое агентство
Malin Space Science SystemsСпутник Выход на орбиту Запуск 12 августа 2005 11:43:00 UTC
Ракета-носитель Стартовая площадка NSSDC ID SCN Технические характеристики Масса 2180 кг, топливо: 1149 кг
Мощность Источники питания Две солнечные батареи площадью 20 м²
Срок активного существования Планируемый: 2 Земных года Текущий: 7 лет, 4 месяца, 9 дней
Элементы орбиты Тип орбиты Полярная
Наклонение 93 °, в 3:00 вечера во время солнцестояния - коррекция орбиты
Период обращения 122 минуты
Апоцентр 320 км
Перицентр 255 км
Целевая аппаратура Полоса захвата 6 км
Скорость передачи до 4 Мбит/с
Сайт проекта  Mars Reconnaissance Orbiter на Викискладе
Mars Reconnaissance Orbiter на ВикискладеMars Reconnaissance Orbiter, MRO— многофункциональная автоматическая межпланетная станция (АМС) НАСА, предназначенная для исследования Марса. Аппарат построен компанией Lockheed Martin под руководством Лаборатории Реактивного Движения, на проект было потрачено 720 млн долл. Управляет аппаратом Лаборатория реактивного движения (Калифорнийский технологический институт); научной стороной миссии управляет НАСА (Вашингтон, округ Колумбия).
Запущен 12 августа 2005 года с космодрома на мысе Канаверал с помощью ракеты-носителя Атлас V. Достигнув Марса 10 марта 2006 года, начал серию манёвров для выхода на нужную орбиту, при помощи т. н. аэродинамического торможения (торможение в верхних слоях атмосферы планеты позволяет значительно сэкономить топливо). Орбитальные манёвры и различные проверки и калибровка оборудования закончились в ноябре 2006 года, после чего аппарат приступил к работе.
Выйдя на орбиту Марса, MRO присоединился к пяти активно функционирующим космическим аппаратам, которые в тот момент находились либо на орбите, либо на поверхности планеты: Mars Global Surveyor, Марс Одиссей, Марс-экспресс и два марсохода (Спирит и Оппортьюнити) — таким образом, был установлен рекорд по количеству активно функционирующих космических аппаратов, находящихся на орбите и поверхности Марса.
MRO содержит целый ряд научных приборов, таких как камеры, спектрометры, радары, которые необходимы для анализа рельефа, стратиграфии, поиска минералов и льда на Марсе. Исследования открывают путь для будущих космических аппаратов по изучению погоды Марса, поверхности, поиска потенциальных мест для посадки и испытание новой телекоммуникационной системы. Телекоммуникационная система MRO передаёт Землю данных больше, чем все предыдущие межпланетные аппараты вместе взятые. Кроме того, MRO используется в качестве сильного спутника-ретранслятора для других исследовательских программ.
Содержание
История
MRO был одним из двух миссий, рассматривавшихся НАСА кандидатом на стартовое окно 2003 года. Однако в процессе выбора были выбраны марсоходы Mars Exploration Rover, а запуск орбитального аппарата был перенесен на 2005 год. НАСА объявило окончательное название аппарата - Mars Reconnaissance Orbiter - 26 октября 2000 года.
MRO спроектирован по весьма успешному аппарату Mars Global Surveyor, который проводил исследования Марса с орбиты. Новый спутник включает в себя большую камеру для съёмки фотографий высокого разрешения. В связи с этим Джим Гарвин заявил, что MRO будет «микроскопом на орбите». MRO также имеет инфракрасный спектрограф.
3 октября 2001 года НАСА выбрало компанию Lockheed Martin в качестве основного подрядчика в изготовлении космического аппарата. К концу 2001 года все инструменты миссии были выбраны. Никаких серьезных ошибок в ходе строительства MRO допущено не было, аппарат был собран в КЦН и 1 мая 2005 года был готов к запуску.
Цели миссии
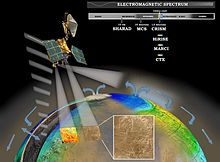 Схема аппаратуры на борту MRO.
Схема аппаратуры на борту MRO.
Научная миссия MRO первоначально была запланирована на 2 земных года, с ноября 2006 года по ноябрь 2008 года. Одной из главных задач миссии является изучение марсианского ландшафта и камерой высокого разрешения выбирать посадочные места для будущих миссий на поверхности Марса. MRO играл важную роль в выборе места посадки для Phoenix Lander, рассматривались места в полярной части Марса. Участок выбран учеными с помощью камеры HiRISE и установлено, что место завалено валунами. После анализа места камерой HiRISE и THEMIS Марс Одиссей, оно было окончательно выбрано. Mars Science Laboratory, также будет иметь своё место посадки. MRO передавал важные данные о телеметрии во время посадки и действовал, в качестве телекоммуникационного спутника.
MRO использует свою научную аппаратуру для изучения марсианского климата, погоды, атмосферы и геологии, искать признаки жидкой воды в полярных шапках и под землёй. Кроме того, MRO ищет обломки ранее утраченных Mars Polar Lander и Beagle 2 аппаратов. После того, как его основные научные исследования завершились, его миссия получило расширение в качестве поддержки связи и систем навигации для аппаратов, роверов и зондов.
Запуск и выведение на орбиту
 MRO по версии художника.
MRO по версии художника.12 августа 2005 года MRO был запущен на борту ракеты Атлас V-401 на космическом стартовом комплексе 41 мыса Канаверал. Верхняя ступень ракеты завершила свою миссию через 56 минут, MRO получил необходимую траекторию для полёта к Марса.
MRO летел через межпланетное пространство семь с половиной месяцев, прежде чем достиг Марса. Во время полёта большая часть научных приборов были протестированы. Чтобы обеспечить правильную траекторию для выхода на орбиту Марса, были запланировано четыре коррекционных маневра, и обсуждалась необходимость пятого. Тем не менее, совершенно было только три коррекционных манёвра, на которые затрачено 27 кг топлива.
MRO начал выходить на орбиту Марса 10 марта 2006 года, проходя над южным полушарием на высоте 370-400 км. Все шесть главных двигателей MRO работали 27 минут, чтобы замедлить скорость спутника с 2900 до 1900 м/с. Температура гелия в баке была холоднее, чем ожидалось, что позволило снизить давление в топливном баке примерно на 21 кПа. Снижение давления позволило снизить тягу двигателей на 2%, но MRO автоматически скомпенсировал это за счет увеличения времени использования двигателей на 33 секунды.
Завершающий орбитальный манёвр переместил аппарат на высокую эллиптическую полярную орбиту с периодом примерно 35,5 часов. Перицентр этой орбиты был удалён на 3806 км от центра планеты (426 км от поверхности), а апоцентр — на 47972 км от центра планеты (44500 км от поверхности).
30 марта 2006 года MRO начал процесс атмосферного торможения, который состоял из 3 этапов и требовал половины всего топлива, необходимого для достижения более низкой круговой орбиты, с более коротким периодом. Во-первых, в течение первых пяти витков вокруг планеты (одна земная неделя) MRO использовал свои двигатели, чтобы перицентр его орбиты был на высоте атмосферного торможения. Высота зависит от толщины атмосферы, так как плотность атмосферы Марса изменяется по сезонам. Во-вторых, используя свои двигатели и внося незначительные изменения в перицентр высоты, MRO поддерживал атмосферное торможение в течение 445 витков вокруг орбиты (около 5 Земных месяца), чтобы уменьшить апоцентр орбиты до 450 километров. Это было сделано таким образом, чтобы сильно не нагреть аппарат, но и войти достаточно глубоко в атмосферу Марса, значительно снизив скорость корабля. В-третьих, после того, как процесс был закончен, MRO использовал свои двигатели, чтобы переместить свой перицентр из границ атмосферы Марса - это произошло 30 августа 2006 года.
В сентябре 2006 года MRO увеличил мощность двигателей, чтобы точнее настроить свою финальную траекторию - почти круговую орбиту на высоте от 250 до 316 километров от поверхности Марса. Радар SHARAD и радиолакационные антенны были развернуты к 16 сентября. Все научные приборы были протестированы, и большинство из них были выключены до солнечного соединения, которое произошло в период с 7 октября до 6 ноября 2006 года. После этого начался "Первый научный этап".
17 ноября 2006 года NASA объявила об успешном испытании систем связи MRO. Данные с марсохода Спирит MRO передавал на Землю и некоторое время служил в качестве ретранслятора.
Обзор миссии

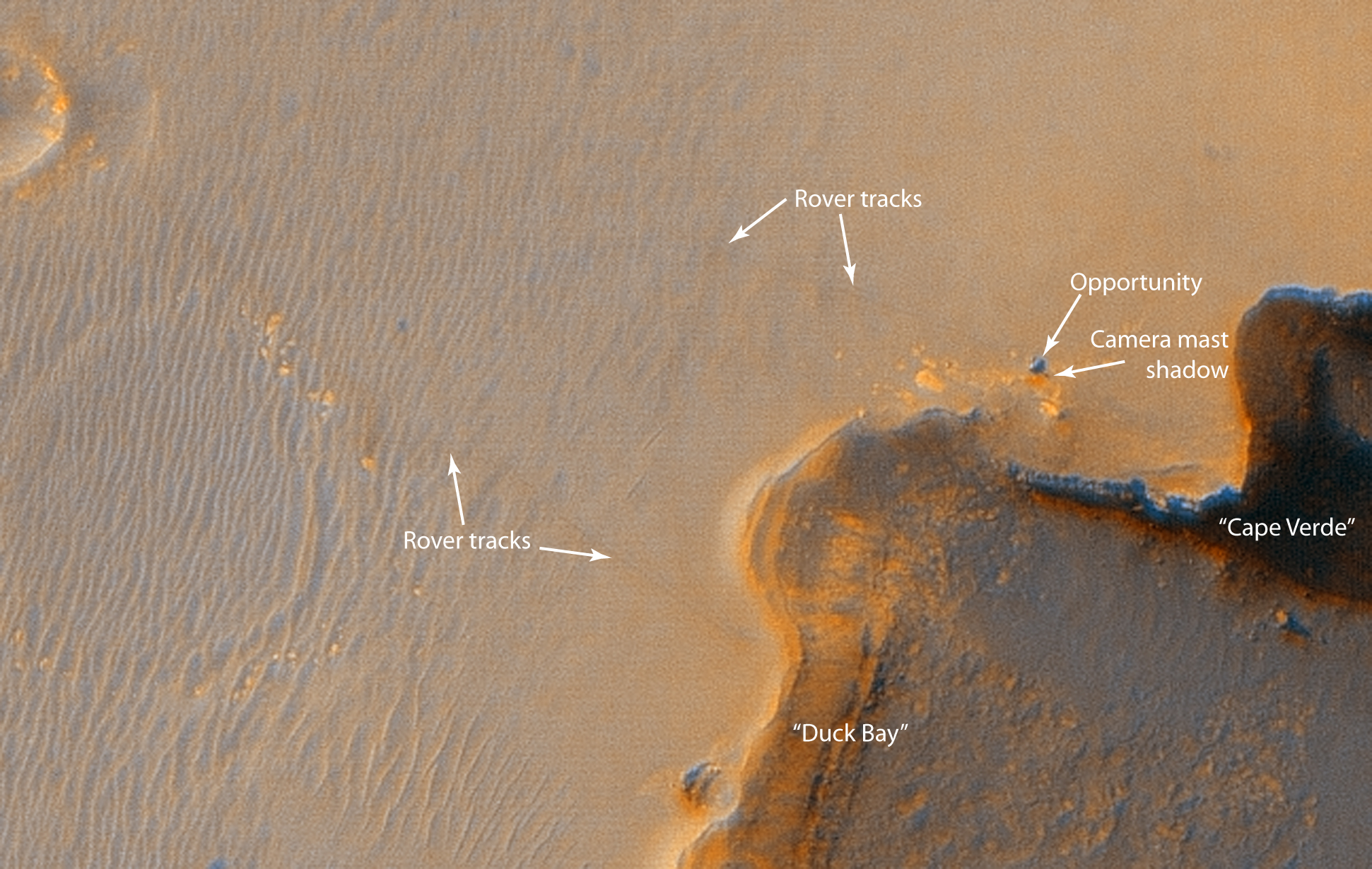
29 сентября 2006 года MRO сделал своё первое изображение в высоком разрешением. На изображении различимы предметы до 90 см в диаметре. 6 октября 2006 года НАСА выложило подробные снимки кратера Виктория вместе с марсоходом Оппортьюнити, находящимся на краю кратера. В ноябре появились неполадки в работе двух инструментов MRO. Был активизирован механизм Mars Climate Sounder (MCS). К декабрю работа приборов была восстановлена, совершённые изменения в работе прибора позволяют ему выполнять большую часть своих прежних наблюдений. Кроме того, в камере HiRISE увеличились шумы, и в результате ПЗС-матрица стала плохо захватывать снимки в высоком разрешении. Длительный прогрев камеры немного улучшил её работу. Причины неполадок так и не были обнаружины, подобные проблемы в работе оборудования могут вернуться снова.
Камера HiRISE продолжает делать качественные снимки, которые помогли учёным в изучении геологии Марса. Важнейшим из открытий является наличие жидкого диоксида углерода (CO2), а также присутствие воды на поверхности планеты в прошлом, когда Марс ещё был геологически активен. 25 мая 2008 года MRO заснял момент, когда аппарат Феникс спускался на парашюте. В 2009 году MRO начал испытывать всё те же проблемы с оборудованием. Так как инженеры не смогли обнаружить причину неполадок, специально для аппарата было создано новое программное обеспечение, которое должно было предотвратить повторяющиеся проблемы в работе систем аппарата.
6 августа 2012 MRO находился в районе кратера Гейла и служил в качестве ретранслятора при посадке нового марсохода Кьюриосити. Камера HiRISE засняла момент спуска марсохода, на снимке видны капсула и сверхзвуковой парашют ровера.
Инструменты
Аппарат имеет три камеры, два спектрометра, размещённые с двумя «Научными-блоками систем», обрабатывающие информацию подсистем, которые в свою очередь принимают научные данные. MRO содержит три экспериментальных-научных инструмента, тестирующиеся на протяжении всего полёта аппарата, а также будут использованы в будущих миссиях. Ожидается, что в год, MRO сделает не менее 5000 фотографий.
HiRISE (камера)
Конструкция
Сухая масса аппарата составляет 1031 кг, ещё 1149 кг приходится на топливо. Две солнечные батареи площадью 20 м² обеспечивают мощность электропитания 2 кВт. Трёхметровая параболическая антенна для дальней космической связи обеспечивает передачу данных со скоростью от 0,5 до 4 Мегабит в секунду в зависимости от расстояния от Земли до Марса.
Стоимость проекта составляет 720 млн долл., из которых на создание самого аппарата пошло 450 млн. долл.
Научная аппаратура
На MRO установлены следующие инструменты:
- HiRISE (High Resolution Imaging Science)
 HiRISE-камера
HiRISE-камера- Камера высокого разрешения. Разрешение снимков, сделанных этой камерой — рекордное: на поверхности Марса с высоты 300 км различимы детали размером всего 30 см, ширина полосы захвата при этом составляет 6 км. Первый снимок был получен 24 марта 2006 года[2].
- CRISM (Compact Reconnaisance Imaging Spectrometer for Mars)
- Видовой спектрометр.
- CTX (Context Camera)
- Панхроматическая контекстная камера.
- MCS (Mars Climate Sounder)
- Метеозонд, предназначен для изучения атмосферы Марса, в том числе наличие в ней льда, пыли, водяного пара. В метеозонде установлены два телескопа с апертурой 4 см и детекторы, предназначенные для регистрации интенсивности излучения в различных диапазонах.
- MARCI (Mars Color Imager)
- Цветная камера, предназначена для исследования марсианской погоды.
- SHARAD (Shallow Subsurface Radar)
- Радиолокатор, предназначен, в первую очередь, для поиска льда, жидкой воды в верхних слоях поверхности Марса.
Результаты миссии

Этот раздел статьи ещё не написан. Согласно замыслу одного из участников Википедии, на этом месте должен располагаться специальный раздел.
Вы можете помочь проекту, написав этот раздел.См. также
Примечания
Ссылки

Mars Reconnaissance Orbiter на Викискладе? - Описание миссии. (англ.)
- Описание камеры высокого разрешения HiRISE. (англ.)
- Mars Reconnaissance Orbiter обнаружил на Марсе карбонаты. (рус.)
Исследования Марса космическими аппаратами Пролётная траектория Маринер-4 • Маринер-6 и -7 • Марс-4 • Розетта • Dawn
С орбиты СА и марсоходы Марс-3 и ПрОП-М • Программа «Викинг» (Викинг-1 / -2) • Pathfinder / Sojourner • MER (Spirit • Оппортьюнити) • Феникс • Curiosity
Будущие миссии MAVEN • Экзомарс • InSight • Фобос-Грунт 2 • Марс-нет и MetNet • Марс-астер • Sample Return Mission • Марс-грунт • пилотируемый полёт
...неудачные Марс-1 • -60A • -60B (1М-М60) • -62A • -62B (2МВ-М62) • Зонд-2А • -2 (3МВ-М64) • Маринер-3 • -8 • Марс-69A • -69B (М69) • Марс-2 (СА и марсоход ПрОП-М) • -71C (М71) • Марс-4 • -7 (М73) • Фобос-1 / -2 (СА ПрОП-Ф и ДАС) • Observer • Марс-96 • Surveyor 98 (Climate Orbiter • Polar Lander) • Нодзоми • Бигль-2 • Фобос-Грунт и Инхо-1
...отменённые Вояджер • Марс-4НМ (Марсоход) • -5НМ • -5М (Марс-79) • Веста (англ.) • Surveyor Lander • NetLander (англ.) • телекоммуникационный орбитальный аппарат • Beagle 3 (англ.) • Astrobiology Explorer-Cacher (англ.)
См. также Жирным выделены действующие АМС  Категории:
Категории:- 2005 год в космонавтике
- Автоматические межпланетные станции
- Исследование Марса
- Космонавтика США
- Искусственные спутники Марса
- НАСА





Wikimedia Foundation. 2010.